Multimodal Vision Research Laboratory
MVRL
learning scene specific shape priors
Overview
 Detecting, isolating, and tracking moving objects in an outdoor scene is a fundamental problem of visual surveillance. A key component of most approaches to this problem is the construction of a background model of intensity values. We propose extending background modeling to include learning a model of the expected shape of foreground objects. This paper describes our approach to shape description, shape space density estimation, and unsupervised model training. A key contribution is a description of properties of the joint distribution of object shape and image location. We show object segmentation and anomalous shape detection results on video captured from road intersections. Our results demonstrate the usefulness of building scene-specific and spatially-localized shape background models.
Detecting, isolating, and tracking moving objects in an outdoor scene is a fundamental problem of visual surveillance. A key component of most approaches to this problem is the construction of a background model of intensity values. We propose extending background modeling to include learning a model of the expected shape of foreground objects. This paper describes our approach to shape description, shape space density estimation, and unsupervised model training. A key contribution is a description of properties of the joint distribution of object shape and image location. We show object segmentation and anomalous shape detection results on video captured from road intersections. Our results demonstrate the usefulness of building scene-specific and spatially-localized shape background models.
Approach
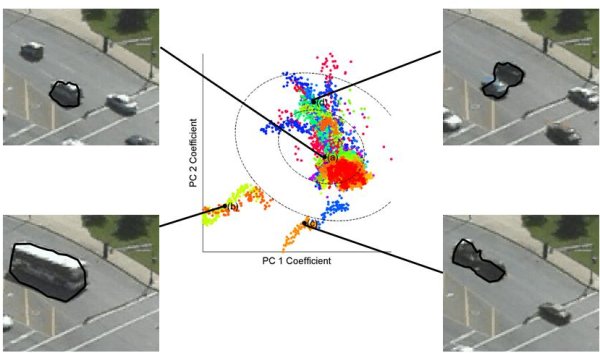
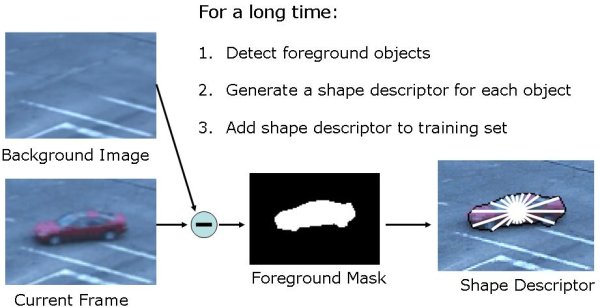
First a large database of examples shapes are collected from the scene, the process is described in the figure below. Then a PCA basis is built from this database. This basis is then used to improve object segmentation and anomaly detection.
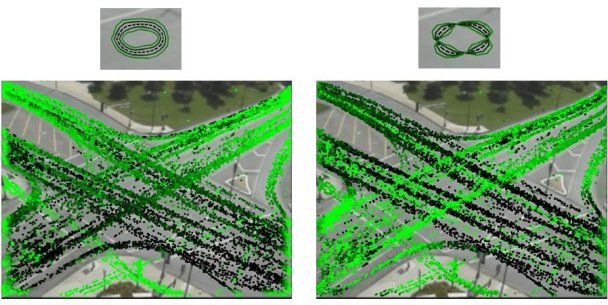
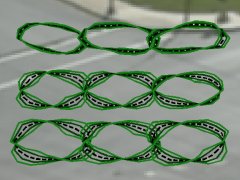
Results